GO1 시뮬2

0. 코드
1.
GO1 및 가제보 환경 켜기
roslaunch go1_config gazebo.launch
JavaScript
복사
실행사진
2.
move_base 실행
roslanch champ_gazebo run.launch
JavaScript
복사
1. 환경설정
•
위 링크에서 simulation을 클릭 한 후 CHAMP를 클릭한다.
•
Github가 들어가질텐데 Readme 따라 진행, 다음은 Readme 내용
# install
sudo apt install -y python-rosdep
cd <your_ws>/src
git clone --recursive https://github.com/chvmp/champ
git clone https://github.com/chvmp/champ_teleop
cd ..
rosdep install --from-paths src --ignore-src -r -y
# build workspace
cd <your_ws>
catkin_make
source <your_ws>/devel/setup.bash
Shell
복사
•
GO1 URDF 다운로드
# robot install
git clone https://github.com/chvmp/robots.git
# in robots folder
mkdir -p descriptions
cd descriptions
git clone https://github.com/chvmp/unitree_ros
Shell
복사
2. 실행
•
Walking demo in RVIZ
# Run the base driver
roslaunch go1_config bringup.launch rviz:=true
# Run the teleop node
roslaunch champ_teleop teleop.launch
Shell
복사
실행영상
•
SLAM demo
# Run the Gazebo environment
# world를 로드하는데 오래걸리므로 5분정도는 기다려 주기
roslaunch go1_config gazebo.launch
# Run gmapping package and move_base
roslaunch go1_config slam.launch rviz:=true
Shell
복사
실행영상
•
Autonomous Navigation
# Run the Gazebo environment
roslaunch go1_config gazebo.launch
# Run amcl and move_base
roslaunch go1_config navigate.launch rviz:=true
Shell
복사
•
Spawning multiple robots in Gazebo
# Run Gazebo and default simulation world
roslaunch champ_gazebo spawn_world.launch
# You can also load your own world file by passing your world's path to 'gazebo_world' argument
roslaunch champ_gazebo spawn_world.launch gazebo_world:=<path_to_world_file>
# Spawning a robot
roslaunch go1_config spawn_robot.launch robot_name:=<unique_robot_name> world_init_x:=<x_position> world_init_y:=<y_position>
Shell
복사
3. Gazebo환경 코드 실행
•
move_ex.py
#! /usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from geometry_msgs.msg import Twist
def twist_publisher():
rospy.init_node('twist_publisher_node', anonymous=True)
# cmd_vel or cmd_vel/smooth로 움직일 수 있음
pub = rospy.Publisher('/cmd_vel/smooth', Twist, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
twist_msg = Twist()
twist_msg.linear.x = 0.5
pub.publish(twist_msg)
rate.sleep()
if __name__ == '__main__':
try:
twist_publisher()
except rospy.ROSInterruptException:
pass
Python
복사
실행영상
•
wego Python code
#!/usr/bin/python
import sys
import time
import math
sys.path.append('../lib/python/amd64')
import robot_interface as sdk
if __name__ == '__main__':
HIGHLEVEL = 0xee
LOWLEVEL = 0xff
udp = sdk.UDP(HIGHLEVEL, 8080, "192.168.123.161", 8082)
cmd = sdk.HighCmd()
state = sdk.HighState()
udp.InitCmdData(cmd)
motiontime = 0
while True:
time.sleep(0.002)
motiontime = motiontime + 1
udp.Recv()
udp.GetRecv(state)
# print(motiontime)
# print(state.imu.rpy[0])
# print(motiontime, state.motorState[0].q, state.motorState[1].q, state.motorState[2].q)
# print(state.imu.rpy[0])
cmd.mode = 0 # 0:idle, default stand 1:forced stand 2:walk continuously
cmd.gaitType = 0
cmd.speedLevel = 0
cmd.footRaiseHeight = 0
cmd.bodyHeight = 0
cmd.euler = [0, 0, 0]
cmd.velocity = [0, 0]
cmd.yawSpeed = 0.0
cmd.reserve = 0
# cmd.mode = 2
# cmd.gaitType = 1
# # cmd.position = [1, 0]
# # cmd.position[0] = 2
# cmd.velocity = [-0.2, 0] # -1 ~ +1
# cmd.yawSpeed = 0
# cmd.bodyHeight = 0.1
if(motiontime > 0 and motiontime < 1000):
cmd.mode = 1
cmd.euler = [-0.3, 0, 0]
if(motiontime > 1000 and motiontime < 2000):
cmd.mode = 1
cmd.euler = [0.3, 0, 0]
if(motiontime > 2000 and motiontime < 3000):
cmd.mode = 1
cmd.euler = [0, -0.2, 0]
...
Python
복사
◦
UDP통신으로 로봇과 연결한 후 하는 것이라 시뮬에서는 안될듯?
4. GPS PLUGIN 셋팅
•
URDF 셋팅(robot < descriptions < unitree_ros < robots < go1_descriptions < xacro < go1.champ.urdf에 다음파일 복붙)
<joint name="gps_joint" type="fixed">
<parent link="trunk"/>
<child link="gps_link"/>
</joint>
<link name="gps_link">
<collision>
<origin xyz="0 0 0.1" rpy="0 0 0"/>
<geometry>
<box size="0.2 0.2 0.2"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0.1" rpy="0 0 0"/>
<geometry>
<box size="0.2 0.2 0.2"/>
</geometry>
<material name="blue"/>
</visual>
<inertial>
<origin xyz="0 0 1" rpy="0 0 0"/>
<mass value="1"/>
<inertia
ixx="1.0" ixy="0.0" ixz="0.0"
iyy="1.0" iyz="0.0"
izz="1.0"/>
</inertial>
</link>
<gazebo>
<plugin name="gazebo_ros_gps" filename="libhector_gazebo_ros_gps.so">
<updateRate>4.0</updateRate>
<bodyName>gps_link</bodyName>
<frameId>gps_link</frameId>
<topicName>/gps/fix</topicName>
<velocityTopicName>/gps/fix_velocity</velocityTopicName>
<referenceLatitude>-30.06022459407145675</referenceLatitude>
<referenceLongitude>-51.173913575780311191</referenceLongitude>
<referenceHeading>90</referenceHeading>
<referenceAltitude>10</referenceAltitude>
<offset>0 0 0</offset>
<drift>0.001 0.001 0.001</drift>
<gaussianNoise>0.05 0.05 0.05</gaussianNoise>
<velocityDrift>0.001 0.001 0.001</velocityDrift>
<velocityGaussianNoise>0.5 0.5 0.5</velocityGaussianNoise>
</plugin>
</gazebo>
JavaScript
복사
•
gps topic = /gps/fix
5. Lidar plugin 셋팅
•
URDF셋팅(robot < descriptions < unitree_ros < robots < go1_descriptions < xacro < go1.champ.urdf에 다음파일 복붙)
<!-- lidar -->
<joint name="hokuyo_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.0 0.0 0.2"/>
<parent link="gps_link"/>
<child link="hokuyo_frame"/>
</joint>
<link name="hokuyo_frame">
<!-- <inertial>
<mass value="0.270"/>
<origin rpy="0 0 0" xyz="0 0 0.5"/>
<inertia ixx="2.632e-4" ixy="0" ixz="0" iyy="2.632e-4" iyz="0" izz="1.62e-4"/>
</inertial> -->
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://hector_sensors_description/meshes/hokuyo_utm30lx/hokuyo_utm_30lx.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 -0.0115"/>
<geometry>
<box size="0.058 0.058 0.087"/>
<!--<mesh filename="package://hector_sensors_description/meshes/hokuyo_utm30lx/hokuyo_utm_30lx.stl"/>-->
</geometry>
</collision>
</link>
<gazebo reference="hokuyo_frame">
<sensor name="hokuyo" type="ray">
<always_on>true</always_on>
<update_rate>30</update_rate>
<pose>0 0 0 0 0 0</pose>
<visualize>true</visualize>
<ray>
<scan>
<horizontal>
<samples>1040</samples>
<resolution>1</resolution>
<min_angle>2.26892802759</min_angle>
<max_angle>-2.26892802759</max_angle>
</horizontal>
</scan>
<range>
<min>0.2</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.004</stddev>
</noise>
</ray>
<plugin filename="libgazebo_ros_laser.so" name="gazebo_ros_hokuyo_controller">
<topicName>scan</topicName>
<frameName>hokuyo_frame</frameName>
</plugin>
</sensor>
</gazebo>
JavaScript
복사
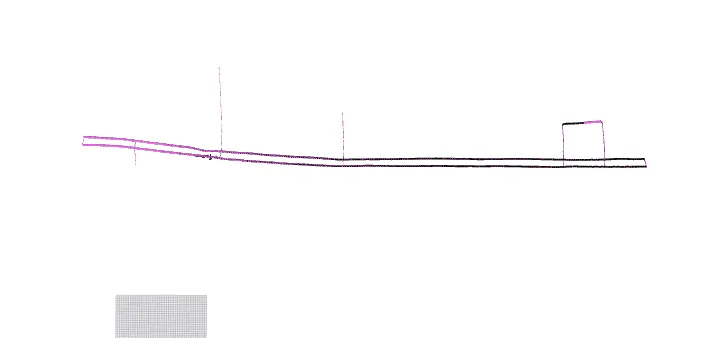
6. Purepursuit을 적용하여 정해진 경로를 따라 로봇 제어
영상
7.
movebase 실험